[Paper review] EgoVLA
업데이트:
How can we teach robots complex manipulation skills? Until now, the dominant approach has been to directly operate robots and collect data. However, this method is expensive, and more importantly, it has a fundamental limitation: you need to have a robot to collect data in the first place.
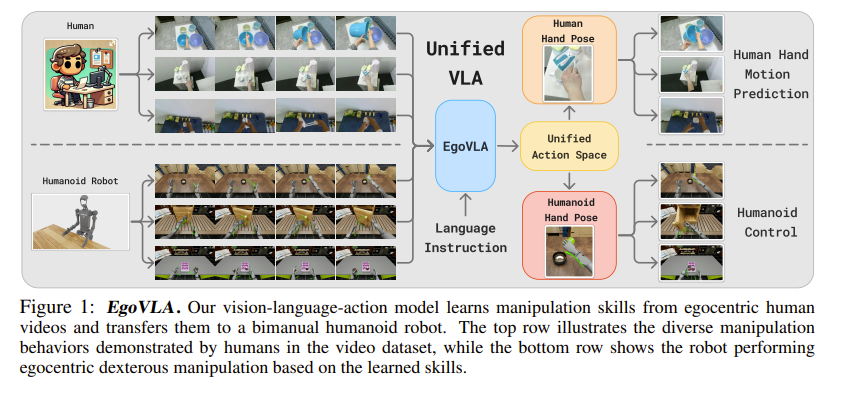
But if you think about it, there are already 8 billion “robots” in the world performing all kinds of manipulation tasks every day, in diverse environments. They are humans. EgoVLA starts from this idea. If we can learn robot policies from human egocentric videos, wouldn’t we be able to secure not only large-scale data, but also diversity in tasks and environments?
Core Idea
Why Human Videos?
The problems with robot data collection are clear:
- Requires robots and expert operators
- Time-consuming and costly
- Impossible to collect data in environments robots cannot access
- Complex tasks are hard to capture even with teleoperation
In contrast, human egocentric videos:
- Already exist at large scale
- Cover diverse environments and tasks
- Capture fine-grained hand movements
Key Insight
The authors’ key observation is the following: the gap between human and robot action spaces is smaller than expected and can be approximated with a few geometric transformations.
Based on this, EgoVLA:
- Trains a Human VLA using human egocentric videos
- Learns to predict wrist positions and hand joint angles
- Transforms them into the robot action space (inverse kinematics + retargeting)
- Fine-tunes with a small amount of robot demonstration data
This enables learning manipulation policies without massive robot datasets.
Methodology
Overall Pipeline
The training pipeline of EgoVLA consists of three main stages:
[Stage 1] Pretraining on human video data
↓
[Stage 2] Unified action space definition
↓
[Stage 3] Fine-tuning with a small amount of robot data
Model Architecture
EgoVLA is built on top of a vision-language model, specifically using NVILA-2B as the backbone.
Inputs:
- Visual observations: current frame + past 5 frames (1 second history, 384×384 resolution)
- Language instructions: natural language description of the task
- Proprioceptive states: wrist position/rotation, hand joint angles
- Action query tokens: special tokens for future action prediction
Outputs:
- Wrist pose (3D position + rotation in the camera frame)
- Hand joint parameters (top 15 PCA components of the MANO model)
- 30-step future prediction up to 1 second (30 Hz)
Action Head:
- 6-layer transformer (300M parameters)
- Hidden size: 1536
- Simultaneous trajectory prediction for both hands
Loss Function:
L = λ_wrist_trans * L_wrist_trans + λ_wrist_rot * L_wrist_rot + λ_joint * L_joint
- Wrist translation: L2 loss
- Wrist rotation: Rot6D rotation loss
- Hand joints: L2 loss
Unified Action Space
This is the core design that bridges the gap between humans and robots.
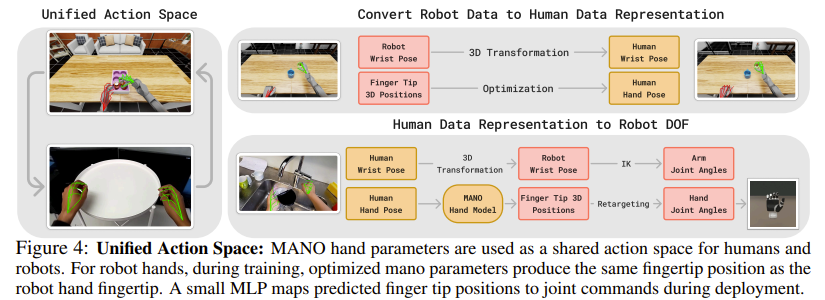
Robot → Human representation (during training):
When fine-tuning with robot data, robot actions must be converted into human representations.
- Wrist pose: coordinate alignment via 3D transformation
- Hand shape: MANO parameter optimization
minimize L(Θ) = (1/5) * Σ SmoothL1(J_pred(Θ)_i, J_obs,i)
- Θ: MANO hand parameters (15D)
- J_pred: fingertip positions from MANO forward kinematics
- J_obs: observed robot fingertip positions (5 × 3D)
Human → Robot (during inference):
Predicted human actions are converted back to robot actions.
- Wrist → end-effector: inverse kinematics to compute arm joint angles
- Hand shape → robot hand: lightweight MLP mapping
- Compute 3D keypoints from MANO
- MLP predicts robot hand joint commands
- Fingertip position error: average 5×10⁻⁵ m
Replaying demonstrations through this retargeting pipeline preserves task validity, meaning transformation errors do not significantly affect control performance.
Dataset
Human Egocentric Manipulation Datasets
EgoVLA combines four public datasets:
| Dataset | Characteristics | Ratio |
|---|---|---|
| HOI4D | 4,000 single-hand manipulation videos Pick-and-place, rotation, articulated objects |
23% |
| HOT3D | 833 minutes, 33 rigid objects Accurate 3D hand/camera poses |
39% |
| HoloAssist | 166 hours of complex tasks Battery replacement, furniture assembly, machine installation Rich bimanual manipulation (noisy labels) |
25% |
| TACO | 2,317 motion sequences 151 tool-action-object combinations |
13% |
Data Processing:
- Sampled at 3 FPS (trade-off between efficiency and temporal continuity)
- World-frame camera poses used to project future wrist positions into the current camera frame
- Approximately 500K image-action pairs in total
Each dataset has strengths and weaknesses, but mixing them:
- Mitigates noise in HoloAssist (1/10 downsampling)
- Compensates for limited language labels in HOT3D
- Achieves balanced coverage of tasks and sources
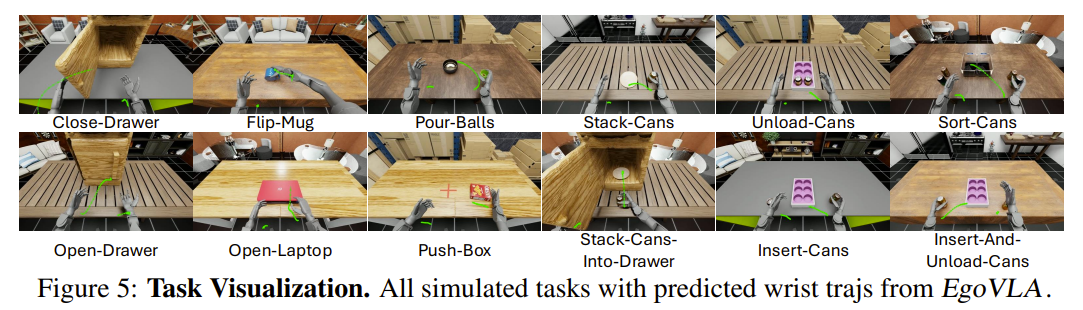
Ego Humanoid Manipulation Benchmark
A new simulation benchmark was built for evaluation.
Platform:
- NVIDIA Isaac Lab
- Unitree H1 humanoid robot
- Inspire dexterous hands (12 DoF per hand: 6 active + 6 mimic joints)
Tasks (12 total):
Short-horizon (atomic) tasks:
- Push-Box
- Flip-Mug
- Pour-Balls
- Close-Drawer
- Open-Drawer
- Open-Laptop
- Stack-Can
Long-horizon (multi-stage) tasks:
- Sort-Cans
- Insert-Cans
- Unload-Cans
- Insert-And-Unload-Cans
- Stack-Can-Into-Drawer
Observation and Control:
- Observations: robot joint positions, end-effector poses, contact forces, egocentric RGB-D
- Control: end-effector control for arms, PD joint control for hands
- Action space: 36D (arm IK + direct hand control)
- Control frequency: 30 Hz
Visual Diversity:
- 5 room textures × 5 table textures = 25 background combinations
- Enables robust generalization evaluation
Demonstrations:
- Collected using OpenTelevision + Meta Quest 3
- 100 successful demonstrations per task
- Fixed environments: Room 1, 2, 3 + Table 1
- Episode length: 100–500 frames
Evaluation Metrics
Two main metrics are used:
- Success Rate (SR): overall task success rate
- Progress Success Rate (PSR): fraction of completed subtasks in long-horizon tasks
Evaluation Setup:
Seen environments:
- Same visual backgrounds as training
- 27 rollouts per task (3 backgrounds × 9 episodes)
Unseen environments:
- Completely new backgrounds
- 66 rollouts per task (22 backgrounds × 3 episodes)
Object positions are randomized in all cases (up to 20 cm × 20 cm, unseen during training).
Experimental Results
Human Manipulation Modeling
Before robot evaluation, human action prediction was validated.
Quantitative Results:
- Average future wrist position error: 8 cm
- Normalized 2D image-plane error: ~0.13 (comparable to HOI-forecast)
Language Understanding:
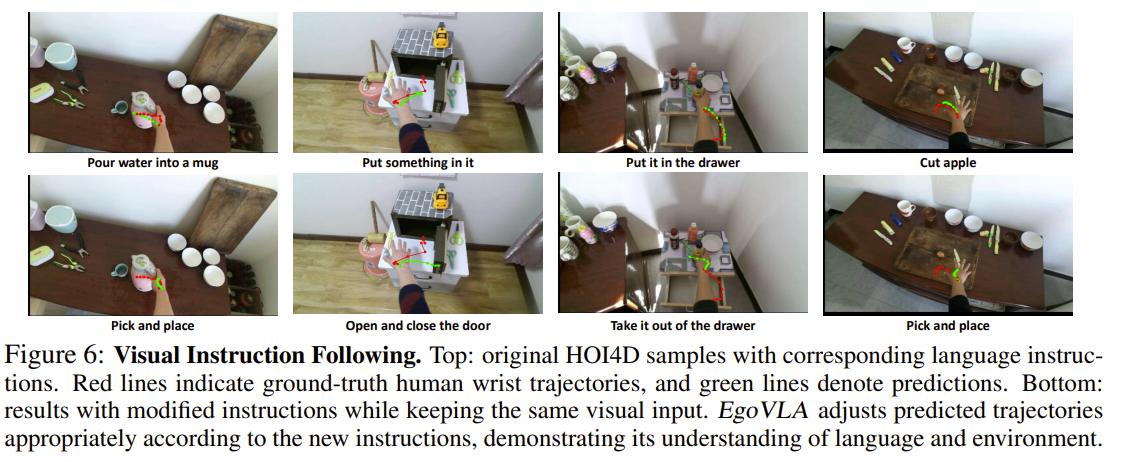
Different instructions on the same video lead to different predicted trajectories:
- “Put into the drawer” → “Take out of the drawer”: trajectory shifts from inside to outside
- “Put inside” → “Open and close the door”: object placement changes to door manipulation
EgoVLA learns not just motion, but the semantic intent of actions.
Humanoid Robot Performance
Baselines:
- ACT: task-specific expert transformers
- EgoVLA-NoPretrain: trained only on robot data without human pretraining
Short-Horizon Results
Seen environments:
| Model | Stack-Can | Push-Box | Open-Drawer | Close-Drawer | Flip-Mug | Pour-Balls | Open-Laptop | Avg SR |
|---|---|---|---|---|---|---|---|---|
| ACT | 22.22 | 11.11 | 18.52 | 48.15 | 7.40 | 3.70 | 62.96 | 24.87 |
| EgoVLA-NoPretrain | 55.56 | 51.85 | 59.26 | 100.00 | 3.70 | 85.19 | 96.30 | 64.55 |
| EgoVLA | 77.78 | 70.37 | 59.26 | 100.00 | 59.26 | 77.78 | 100.00 | 77.78 |
Unseen environments:
| Model | Avg SR | Avg PSR |
|---|---|---|
| ACT | 24.89 | 54.22 |
| EgoVLA-NoPretrain | 51.28 | 62.63 |
| EgoVLA | 69.11 | 76.26 |
Observations:
- EgoVLA outperforms baselines across all tasks
- Large gains in fine manipulation tasks like Stack-Cans and Flip-Mug
- Robust performance in unseen environments
- EgoVLA-NoPretrain drops 23% in unseen settings, EgoVLA only slightly
Long-Horizon Results
Seen environments:
| Model | Insert-And-Unload | Stack-Into-Drawer | Sort-Cans | Unload-Cans | Insert-Cans | Avg SR | Avg PSR |
|---|---|---|---|---|---|---|---|
| ACT | 0.00 | 11.11 | 0.00 | 0.00 | 0.00 | 2.22 | 26.47 |
| EgoVLA-NoPretrain | 7.41 | 0.00 | 51.85 | 62.96 | 11.11 | 26.67 | 54.93 |
| EgoVLA | 44.44 | 40.74 | 55.56 | 66.67 | 22.22 | 45.93 | 80.78 |
Unseen environments:
| Model | Avg SR | Avg PSR |
|---|---|---|
| ACT | 0.61 | 23.51 |
| EgoVLA-NoPretrain | 11.21 | 36.20 |
| EgoVLA | 28.79 | 69.11 |
Key Findings:
- Generalist models vastly outperform expert models in long-horizon tasks
- Experts struggle with low-level control and long-term planning simultaneously
- Generalists reuse shared low-level skills across tasks
- EgoVLA achieves ~20% higher success than EgoVLA-NoPretrain
Zero-Shot Transfer Is Not Possible
Interestingly, deploying EgoVLA pretrained on human videos without robot fine-tuning yields 0% success across all tasks.
Reasons include:
- Morphological differences (human vs robot hands)
- Perceptual differences (camera placement, FOV)
- Kinematic differences (joint structures and ranges)
Even tasks seen during pretraining (e.g., pouring balls) fail on robots. Robot-domain fine-tuning is essential.
Ablation Studies
Robot Data Scale
Comparison using only 50% of robot demonstrations.
Short-horizon (Seen):
- EgoVLA (100%): SR 77.78%
- EgoVLA (50%): SR 48.15%
Long-horizon (Seen):
- EgoVLA (100%): SR 45.93%
- EgoVLA (50%): SR 7.41% (significant drop)
Conclusion: Human video pretraining helps greatly, but a sufficient amount of robot demonstrations is still required.
Dataset Mixing
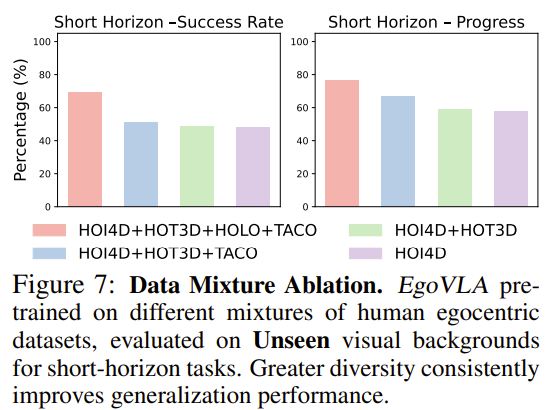
Pretraining with different combinations:
HOI4D only
↓ (+HOT3D)
HOI4D + HOT3D
↓ (+TACO)
HOI4D + HOT3D + TACO
↓ (+HoloAssist)
All datasets
Findings:
- Performance improves with data scale and diversity
- Positive transfer despite noisy labels in HoloAssist
- HOT3D contributes despite limited language annotations
- TACO helps despite limited visual diversity
→ Indicates robustness to dataset imperfections.
Spatial Generalization
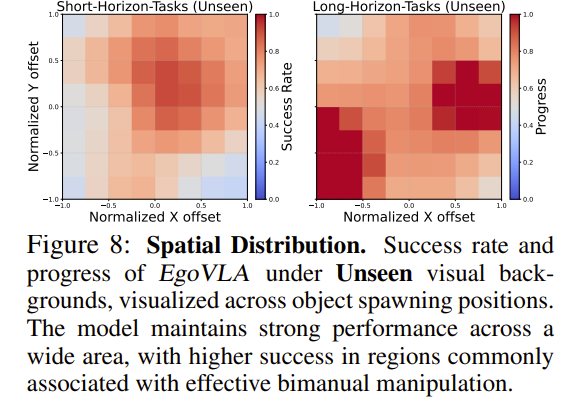
Success-rate heatmaps over object spawn locations:
Short-horizon:
- Higher success near the center
- Stable performance over a wide area
Long-horizon:
- Two distinct high-probability regions
- Reflects bimanual manipulation characteristics
EgoVLA remains robust under spatial variations up to 20 cm × 20 cm.
Trajectory Visualization
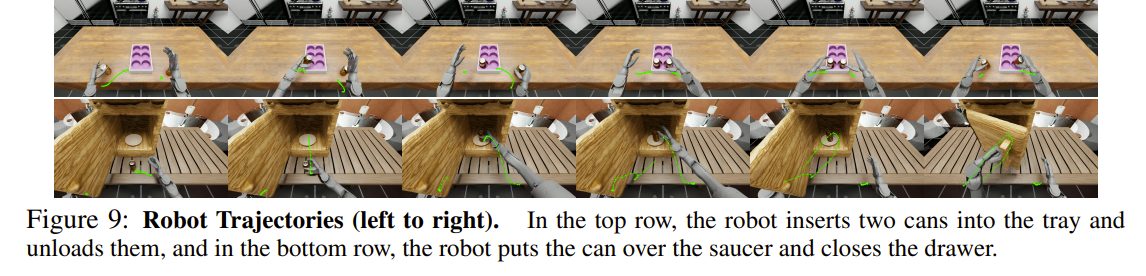
Long-horizon execution examples:
- Top row: insert two cans into a tray, then unload
- Bottom row: place cans on a plate, then close a drawer
With only 100 demonstrations per task, EgoVLA:
- Successfully performs diverse long-horizon tasks
- Exhibits strong spatial and visual generalization
- Generates smooth wrist trajectories
Limitations and Future Work
Current Limitations
1. Pose Annotation Requirement
Pretraining requires hand and wrist pose annotations, which may limit data availability.
However…
- Increasing adoption of AR/VR devices (Quest 3, Vision Pro, Aria Glasses)
- Advances in high-quality hand tracking ease pose data collection
2. No Zero-Shot Transfer
Despite unified action space pretraining, robot fine-tuning is still required.
Future directions:
- More invariant pretraining strategies
- Improved zero-shot transfer
- Further reduction of robot data requirements
3. Simulation-Based Evaluation
The benchmark is simulation-based, and a sim-to-real gap may remain.
Mitigations:
- Recent studies show strong correlation between simulation and real-world performance
- Reproducible and cost-effective evaluation
- Modality-invariant methods applicable to real teleoperation data
Significance and Conclusion
Main Contributions
1. New Learning Paradigm
- Shift from robot-only data to human video utilization
- Large-scale data with diverse tasks and environments
2. Unified Action Space
- Alignment between human and robot hand representations
- Enables embodiment transfer
3. Practical Effectiveness
- Strong generalization with limited robot data
- Robust to new visual environments and spatial variations
4. Benchmark Release
- Ego Humanoid Manipulation Benchmark
- Reproducible evaluation framework
Key Message
EgoVLA presents a way to break through the data scale bottleneck in robot learning. By leveraging rich human manipulation experience and adapting with a small amount of robot data, it offers an efficient and scalable approach.
Although zero-shot transfer is not yet achievable, this work demonstrates:
- Human manipulation knowledge can transfer to robots
- Data diversity is critical for generalization
- Proper embodiment bridging can overcome large gaps
Looking Forward
This work is a starting point. Future directions include:
- Larger-scale human video datasets
- More effective embodiment bridging techniques
- Real-world robot deployment and validation
- Improved zero-shot transfer capabilities
With continued progress, robots may one day manipulate the world as freely and flexibly as humans.
댓글남기기